




Who We Are

VIVA Lab at the University of Ottawa.
What We Do
- Artificial Intelligence
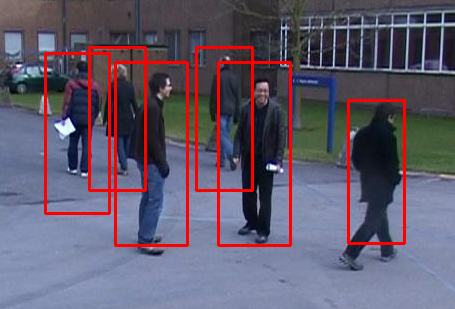
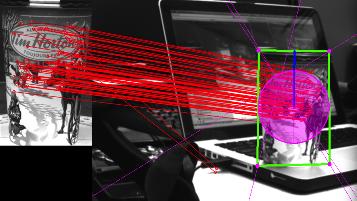
- Computer Vision
- Machine Learning
- Robotics
- Image Processing
Leading Team
-

Prof. Robert Laganiere
Computer Vision, Machine Learning -

Prof. Jochen Lang
Computer Graphics, Computer Vision -

Prof. Pierre Payeur
Robotics