*Semantics
The event pool for the state machine is the event pool of the instance according to the behaviored context classifier, or
the classifier owning the behavioral feature for which the state machine is a method.
Event processing - run-to-completion step
Event occurrences are detected, dispatched, and then processed by the state machine, one at a time. The order of dequeuing
is not defined, leaving open the possibility of modeling different priority-based schemes.
The semantics of event occurrence processing is based on the run-to-completion assumption, interpreted as run-tocompletion
processing. Run-to-completion processing means that an event occurrence can only be taken from the pool and dispatched if
the processing of the previous current occurrence is fully completed.
Run-to-completion may be implemented in various ways. For active classes, it may be realized by an event-loop running in its
own thread, and that reads event occurrences from a pool. For passive classes it may be implemented as a monitor.
The processing of a single event occurrence by a state machine is known as a run-to-completion step. Before commencing on
a run-to-completion step, a state machine is in a stable state configuration with all entry/exit/internal activities (but
not necessarily state (do) activities) completed. The same conditions apply after the run-to-completion step is completed.
Thus, an event occurrence will never be processed while the state machine is in some intermediate and inconsistent situation.
The run-to-completion step is the passage between two state configurations of the state machine.
The run-to-completion assumption simplifies the transition function of the state machine, since concurrency conflicts are
avoided during the processing of event, allowing the state machine to safely complete its run-to-completion step.
When an event occurrence is detected and dispatched, it may result in one or more transitions being enabled for firing. If
no transition is enabled and the event (type) is not in the deferred event list of the current state configuration, the event
occurrence is discarded and the run-to-completion step is completed.
In the presence of orthogonal regions it is possible to fire multiple transitions as a result of the same event occurrence
— as many as one transition in each region in the current state configuration. In case where one or more transitions are enabled,
the state machine selects a subset and fires them. Which of the enabled transitions actually fire is determined by the transition
selection algorithm described below. The order in which selected transitions fire is not defined.
Each orthogonal region in the active state configuration that is not decomposed into orthogonal regions (i.e., bottomlevel
region) can fire at most one transition as a result of the current event occurrence. When all orthogonal regions have finished
executing the transition, the current event occurrence is fully consumed, and the run-to-completion step is completed.
Issue 8433 -replace ‘complete’ with ‘completes’
During a transition, a number of actions may be executed. If such an action is a synchronous operation invocation on an object
executing a state machine, then the transition step is not completed until the invoked object completes its run-tocompletion
step.
Run-to-completion and concurrency
It is possible to define state machine semantics by allowing the run-to-completion steps to be applied orthogonally to the
orthogonal regions of a composite state, rather than to the whole state machine. This would allow the event serialization
constraint to be relaxed. However, such semantics are quite subtle and difficult to implement. Therefore, the dynamic semantics
defined in this document are based on the premise that a single run-to-completion step applies to the entire state machine
and includes the steps taken by orthogonal regions in the active state configuration.
In case of active objects, where each object has its own thread of execution, it is very important to clearly distinguish
the notion of run to completion from the concept of thread pre-emption. Namely, run-to-completion event handling is performed
by a thread that, in principle, can be pre-empted and its execution suspended in favor of another thread executing on the
same processing node. (This is determined by the scheduling policy of the underlying thread environment — no assumptions are
made about this policy.) When the suspended thread is assigned processor time again, it resumes its event processing from
the point of pre-emption and, eventually, completes its event processing.
Conflicting transitions
It was already noted that it is possible for more than one transition to be enabled within a state machine. If that happens,
then such transitions may be in conflict with each other. For example, consider the case of two transitions originating from
the same state, triggered by the same event, but with different guards. If that event occurs and both guard conditions are
true, then only one transition will fire. In other words, in case of conflicting transitions, only one of them will fire in
a single run-to-completion step.
Two transitions are said to conflict if they both exit the same state, or, more precisely, that the intersection of the set
of states they exit is non-empty. Only transitions that occur in mutually orthogonal regions may be fired simultaneously.
This constraint guarantees that the new active state configuration resulting from executing the set of transitions is well
formed.
An internal transition in a state conflicts only with transitions that cause an exit from that state.
Firing priorities
In situations where there are conflicting transitions, the selection of which transitions will fire is based in part on an
implicit priority. These priorities resolve some transition conflicts, but not all of them. The priorities of conflicting
transitions are based on their relative position in the state hierarchy. By definition, a transition originating from a substate
has higher priority than a conflicting transition originating from any of its containing states.
The priority of a transition is defined based on its source state. The priority of joined transitions is based on the priority
of the transition with the most transitively nested source state.
In general, if t1 is a transition whose source state is s1, and t2 has source s2, then:
• If s1 is a direct or transitively nested substate of s2, then t1 has higher priority than t2.
• If s1 and s2 are not in the same state configuration, then there is no priority difference between t1 and t2.
Transition selection algorithm
The set of transitions that will fire is a maximal set of transitions that satisfies the following conditions:
• All transitions in the set are enabled.
• There are no conflicting transitions within the set.
• There is no transition outside the set that has higher priority than a transition in the set (that is, enabled transitions with highest priorities are in the set while conflicting transitions with lower priorities are left out).
This can be easily implemented by a greedy selection algorithm, with a straightforward traversal of the active state configuration.
States in the active state configuration are traversed starting with the innermost nested simple states and working outwards.
For each state at a given level, all originating transitions are evaluated to determine if they are enabled. This traversal
guarantees that the priority principle is not violated. The only non-trivial issue is resolving transition conflicts across
orthogonal states on all levels. This is resolved by terminating the search in each orthogonal state once a transition inside
any one of its components is fired.
StateMachine extension
A state machine is generalizable. A specialized state machine is an extension of the general state machine, in that regions,
vertices, and transitions may be added; regions and states may be redefined (extended: simple states to composite states and
composite states by adding states and transitions); and transitions can be redefined.
As part of a classifier generalization, the classifierBehavior state machine of the general classifier and the method state
machines of behavioral features of the general classifier can be redefined (by other state machines). These state machines
may be specializations (extensions) of the corresponding state machines of the general classifier or of its behavioral features.
A specialized state machine will have all the elements of the general state machine, and it may have additional elements.
Region s may be added. Inherited regions may be redefined by extension: States and vertices are inherited, and states and transitions
of the regions of the state machine may be redefined.
A simple state can be redefined (extended) to a composite state, by adding one or more regions.
A composite state can be redefined (extended) by either extending inherited regions or by adding regions as well as by adding
entry and exit points. A region is extended by adding vertices, states, and transitions and by redefining states and transitions.
A submachine state may be redefined. The submachine state machine may be replaced by another submachine state machine, provided
that it has the same entry/exit points as the redefined submachine state machine, but it may add entry/ exit points.
Issue 8433 -replace ‘is’ by ‘are’
Transitions can have their content and target state replaced, while the source state and trigger are preserved.
In case of multiple general classifiers, extension implies that the extension state machine gets orthogonal regions for each
of the state machines of the general classifiers in addition to the one of the specific classifier.
Notation
A state machine diagram is a graph that represents a state machine. States and various other types of vertices (pseudostates)
in the state machine graph are rendered by appropriate state and pseudostate symbols, while transitions are generally rendered
by directed arcs that connect them or by control icons representing the actions of the behavior on the
transition (page 599).
The association between a state machine and its context classifier or behavioral feature does not have a special notation.
A state machine that is an extension of the state machine in a general classifier will have the keyword «extended» associated
with the name of the state machine.
The default notation for classifier is used for denoting state machines. The keyword is «statemachine».
Inherited states are drawn with dashed lines or gary-toned lines.
Presentation option
Inherited states are drawn with gray-toned lines.
Examples
Figure 15.41 is an example statemachine diagram for the state machine for simple telephone object. In addition to the
initial state, the state machine has an entry point called activeEntry, and in addition to the final state, it has an exit
point called aborted.
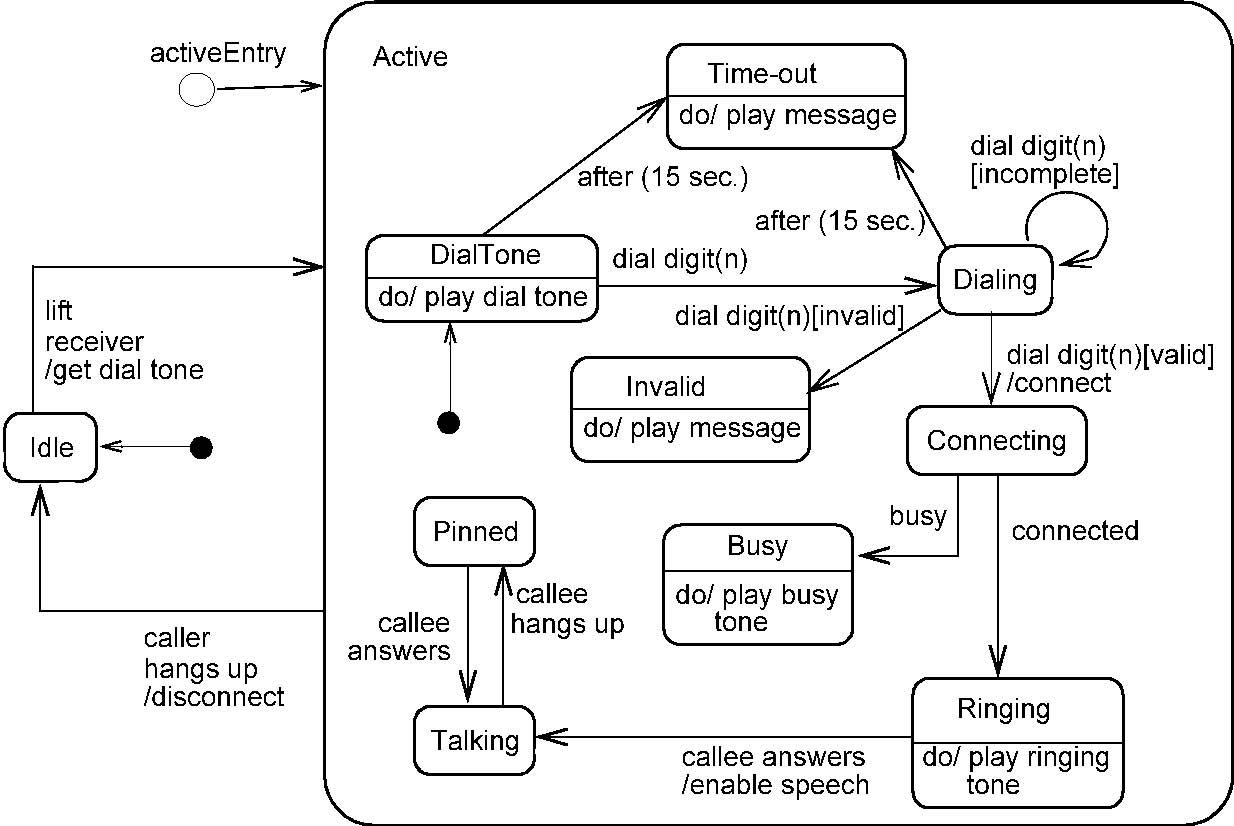

terminate
abort
aborted
Figure 15.41 - State machine diagram representing a state machine
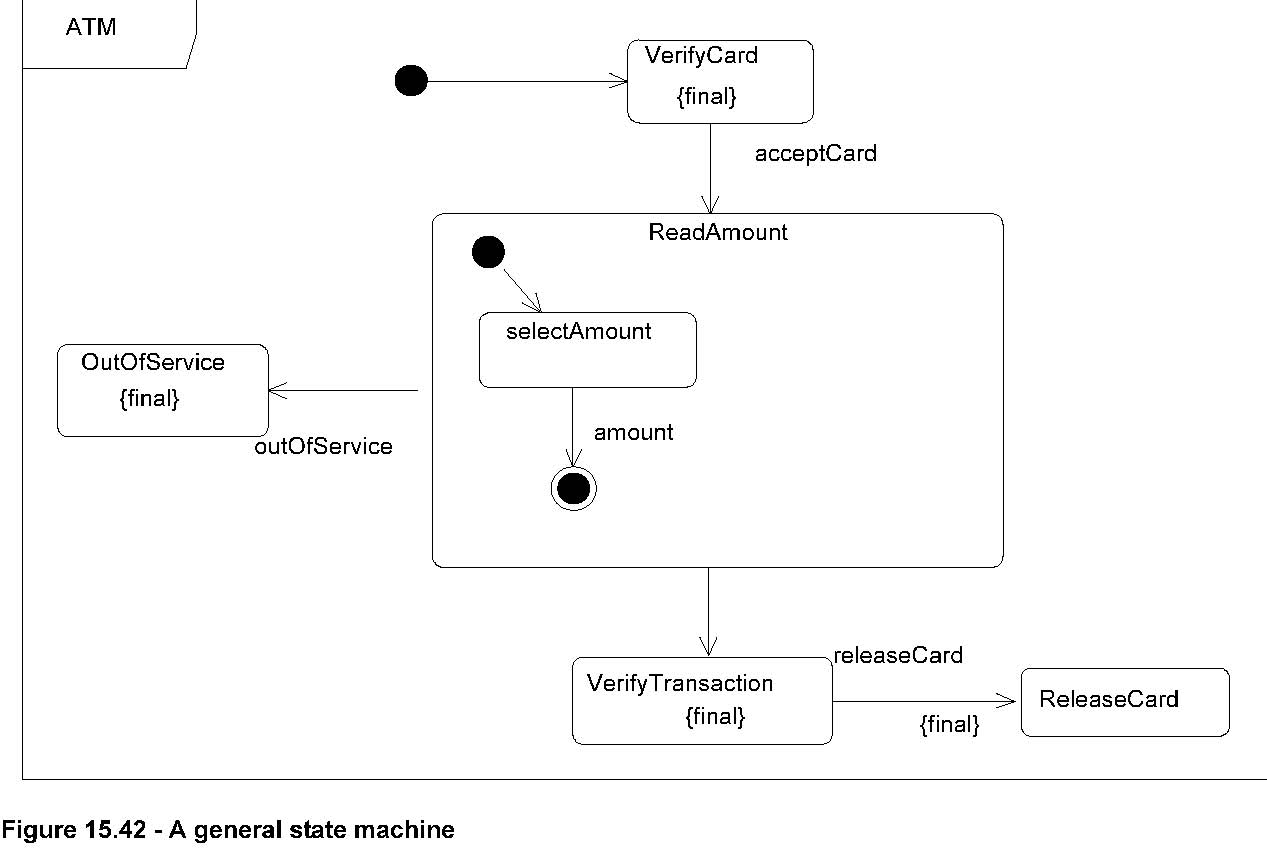
As an example of state machine specialization, the states VerifyCard, OutOfService, and VerifyTransaction in the ATM state
machine in
Figure 15.42
have been specified as {final}, which means that they cannot be redefined (i.e., extended) in specializations of ATM. The
other states can be redefined. The (verifyTransaction,releaseCard) transition has also been specified as {final}, meaning
that the effect behavior and the target state cannot be redefined.
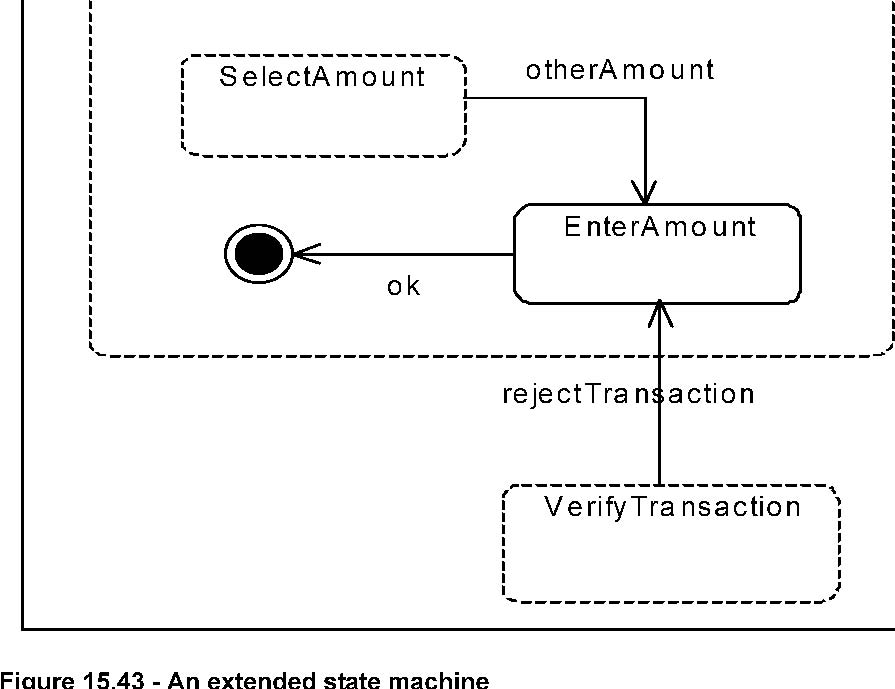
In
Figure 15.43
a specialized ATM (which is the statemachine of a class that is a specialization of the class with the ATM statemachine of
Figure 15.42
) is defined by extending the composite state by adding a state and a transition, so that users can enter the desired amount.
In addition a transition is added from an inherited state to the newly introduced state.





Rationale
The rationale for statemachine extension is that it shall be possible to define the redefined behavior of a special classifier
as an extension of the behavior of the general classifier.
Changes from previous UML
Issue 8433 -clarify
State machine extension is an extension of 1.x. In 1.x, state machine generalization is only explained informally discussed
as a non-normative practice.
Rationale
State machines are used for the definition of behavior (for example, classes that are generalizable). As part of the specialization
of a class it is desirable also to specialize the behavior definition.