Fast Target Recognition on Mobile Devices
Objective
 This work analyzes the problem of homography
estimation for robust target matching in the context of real-time
mobile vision. We present a device-friendly implementation
of the Gaussian Elimination algorithm and show that our
optimized approach can significantly improve the homography
estimation step in a hypothesize-and-verify scheme. Experiments
are performed on image sequences in which both speed
and accuracy are evaluated and compared with conventional
homography estimation schemes.
This work analyzes the problem of homography
estimation for robust target matching in the context of real-time
mobile vision. We present a device-friendly implementation
of the Gaussian Elimination algorithm and show that our
optimized approach can significantly improve the homography
estimation step in a hypothesize-and-verify scheme. Experiments
are performed on image sequences in which both speed
and accuracy are evaluated and compared with conventional
homography estimation schemes.
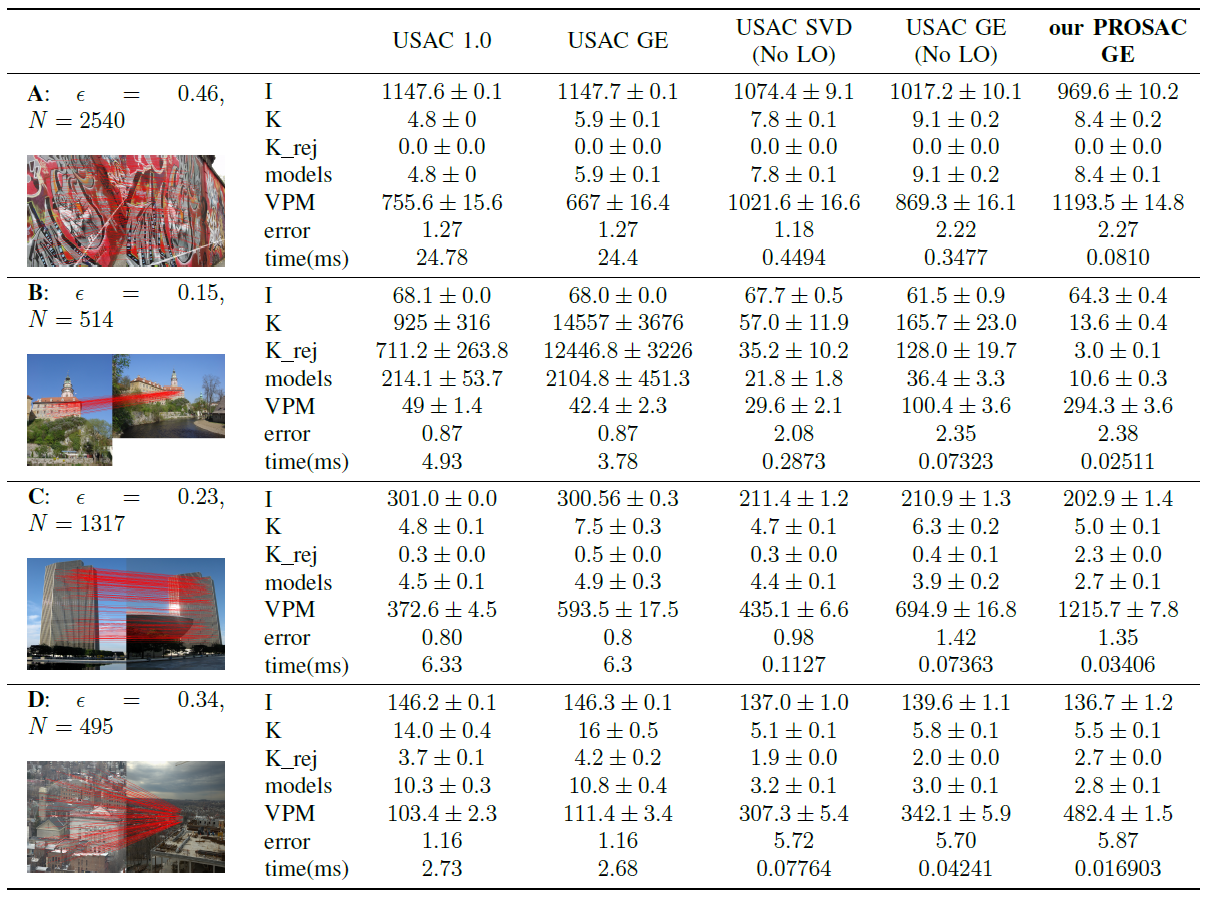
Results