| Mobile Robotics | |||
| Participants Alain Boyer M.A.Sc. student 2006-2009 Karen Soueidan coop trainee 2007 Ivana Duvnjak summer internship 2007 Bassel Abou Merhy M.A.Sc. student 2004-2006 Dr. Pierre Payeur SITE, University of Ottawa Collaborators Dr. Emil Petriu SITE, University of Ottawa Ontario Centres of Excellence Natural Sciences and Engineering Research Council of Canada |
Mobile robots offer a fantastic testing platform for the development of autonomous systems. It also opens the door to
several research opportunities and challenges. Simulation of mobile robots has been used extensively in our group. Moreover,
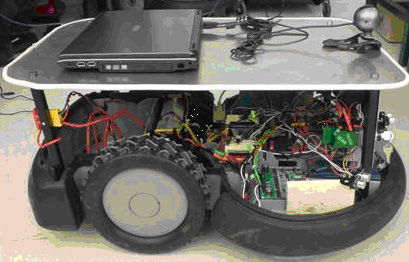
a flexible mobile platform has been designed and built to provide testing capabilities for new sensing technologies, modeling,
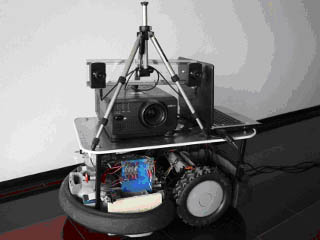
registration, path planning, collision avoidance and remote control. The objective of the development were to build a device that would provide enough energy to offer sufficient autonomy while supporting the operation of on-board processors, projection devices and sensors. The size of the platform was also selected to allow navigation in both indoor and outdoor locations with the possibility to deal with moderately rough surfaces. Remote operation of the platform is also made possible by the integration of different communication channels, including RF and wireless networking protocols. The resulting mobile robot counts on an embedded micro-controller to achieve low level control of its actuator and ensure safe operation, while higher level data processing for live evaluation of sensory information, including 3D vision sensors, and decisions making are ensured by an on-board laptop directly interfaced with the low level micro-controller.
The mobile platform can be equipped with 3D vision sensors for autonomous remote environment exploration. It provides an ideal tool for research on simultaneous localization and mapping (SLAM), for virtualized reality data collection, and for path planning with collisions avoidance, as well as for evaluation of communication technologies for remote control of robotic systems.
|
Related Publications
|
© SMART Research Group, 2008