| Selective Range and Tactile Data Acquisition | ||||||
| Participants Phillip Curtis Ph.D. student 2006-... Ana-Maria Cretu Ph.D. student 2004-2009 Dr. Pierre Payeur SITE, University of Ottawa Dr. Emil Petriu SITE, University of Ottawa Collaborators Neptec Design Group Ontario Centres of Excellence Natural Sciences and Engineering Research Council of Canada |
Modern range sensing technologies are able to provide very high-resolution three-dimensional maps of objects and environments
within short scanning times. Unfortunately they still operate brute force scanning following predefined patterns. The collection
of such a rich flow of information has brought a new challenge in the selection of only relevant features out of the avalanche of
data generated by the sensors. The development of intelligent scanning technologies represents the next major step to be achieved
in the evolution of scanning systems for 3D environments. Such refinements are critical under the new trend in sensing techniques
that aims at combining different modalities, such as active triangulation and time-of-flight, to dynamically adapt the perception
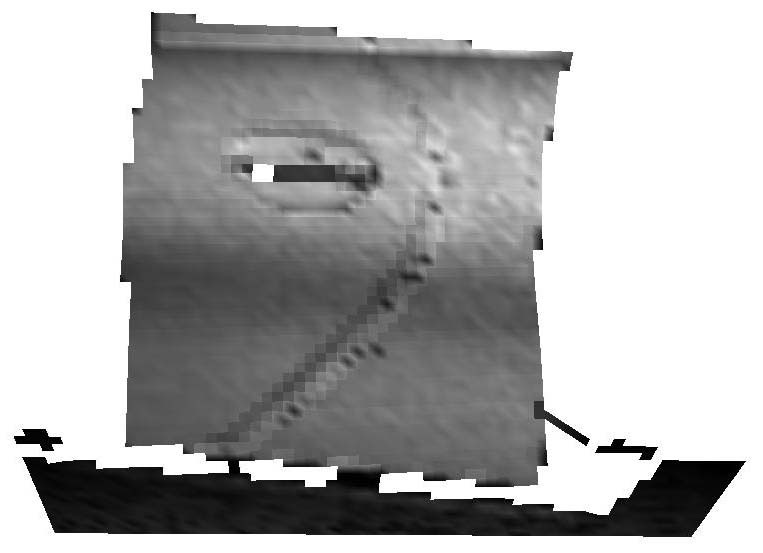
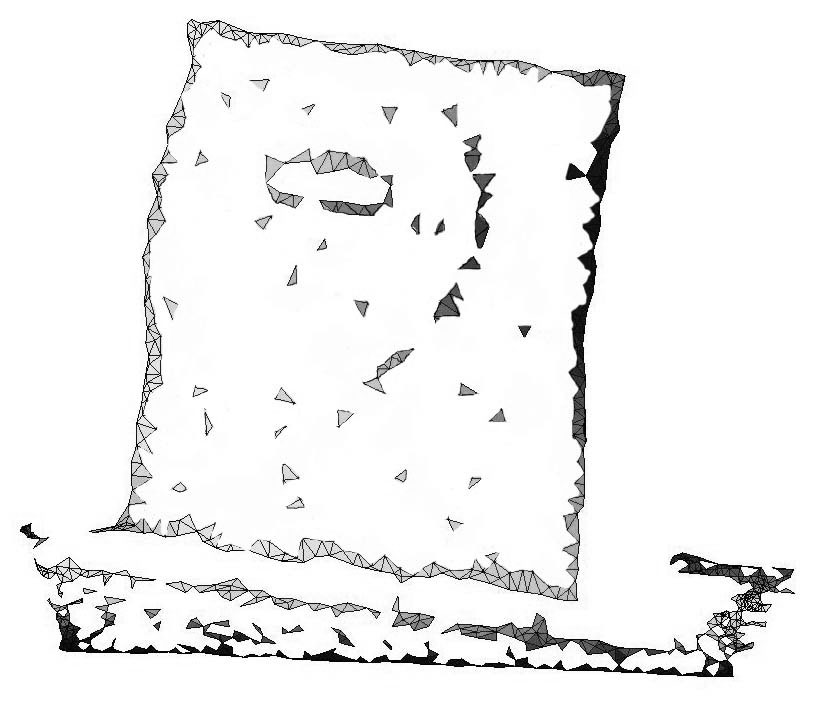
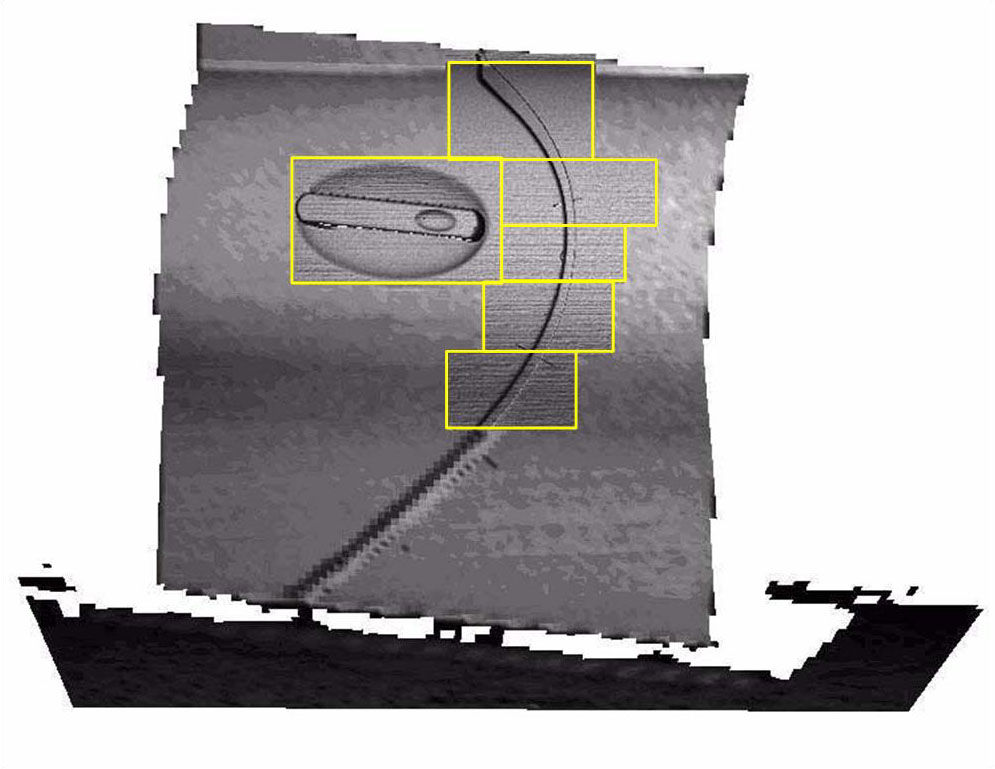
to the depth and desired resolution over the surfaces. The main objective of this research is to design and integrate innovative technologies for automatic selection of optimal sensing modalities and scanning areas for fixed and mobile sensors to focus on features that maximize model's confidence or are critical for a robotic task, without relying on human guidance. Some early work has been pursued to automate range scanner operation according to the scene's content but the focus has been placed on the improvement of the scanner performance rather than on the richness and reliability of information made available to an autonomous robot. Several techniques are considered to achieve automated selection of scanning regions. A solution using neural gas networks has been investigated to adaptively select regions of interest that require further sampling from a cloud of 3D measurements sparsely collected. The technique automatically determines bounded areas where sensing is required at higher resolution to accurately map 3D surfaces with tiny features. It provides significant benefits over brute force strategies as scanning time is reduced and datasets size is kept manageable.
Other approaches are currently investigated that build upon a probabilistic representation of space occupancy, which can be used to drive a mathematical framework to provide an optimisation of both space coverage, for robot navigation safety, and resolution of the representation, for accuracy of interactions. |

Related Publications
|
© SMART Research Group, 2009