| 3D Vision with Structured Lighting | |||||
| Participants Alain Boyer M.A.Sc. student 2006-2009 Danick Desjardins M.A.Sc. student 2004-2008 Dr. Pierre Payeur SITE, University of Ottawa Collaborators Neptec Design Group Ontario Centres of Excellence |
The collection of 3D data on free-form objects has been achieved in several ways. The most accurate acquisition method still remains
that of laser range sensors but it entails the purchase of highly-priced specialized equipment. Calibrated stereovision has also been
successfully used but relies on the presence of natural features over the scene, which often lead to only sparse 3D data. Until now,
most dense stereovision schemes that have been proposed demonstrated limited performance. On the other hand, when artificial textures
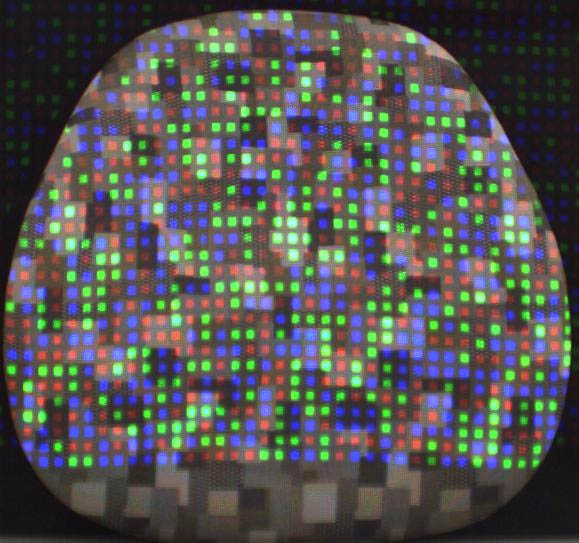
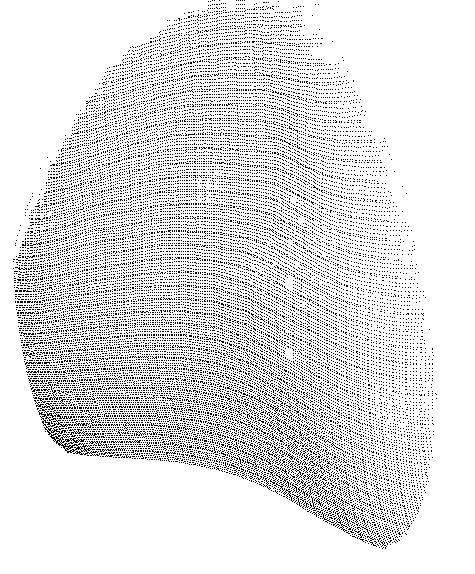
are selectively projected over the scene with structured lighting, a drastic improvement of stereovision performance is observed. The objective of this research work is to develop 3D imaging techniques that operate with affordable off-the-shelf equipment while being robust to the conditions prevailing in their environment, such as the intrinsic color of surfaces and of ambient lighting, the significant variations of depths observed in typical scenes, etc. The ultimate goal is to develop an affordable 3D imager that can be mounted on a mobile platform to autonomously explore unknown environments. Such applications considerably differ from typical setups where a single object is modeled with high resolution in a tightly controlled scene. Several aspects are being investigated to achieve our goals, including the calibration of cameras, the selection of structured lighting patterns that can be appropriate for the type of applications considered, the merge of 3D measurements collected from different viewpoints, the focus and exposure control of the projective and sensing devices, the segmentation of images collected under harsh conditions, and the adaptive density of measurements. The simultaneous acquisition of both the 3D shape and of the surface texture/color of objects also reveals to be essential to further discriminate between objects during exploration. It represents an important asset of the technology being developed.
Early results demonstrated the potential of stereoscopic sensors with adaptive structured lighting to reconstruct 3D and colored models of objects of different complexities, with data collected in environments where lighting is not perfectly controlled. Current work aims at improving the overall robustness and mobility of the sensor. |


Related Publications
|
© SMART Research Group, 2009